On May 20, RoboChallenge Table30, the world's largest real-world embodied AI benchmarking platform, released its latest rankings. The embodied AI model Era0, developed by Robotera, ranked first overall with both a task success rate of 64.33 percent and an execution score of 76.34. It also claimed first place in 17 of the 30 desktop dexterous manipulation tasks, setting a new record.
Source: RoboChallenge
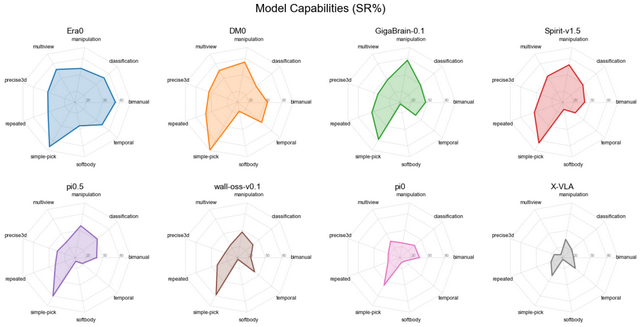
RoboChallenge aims to systematically evaluate the comprehensive capabilities of embodied AI models through standardized and reproducible real-world robotic testing scenarios. The benchmark covers major challenges such as dual-arm coordination, flexible object manipulation, multi-view perception, and long-horizon memory. In addition to measuring task completion, it also quantitatively evaluates the quality of task execution.
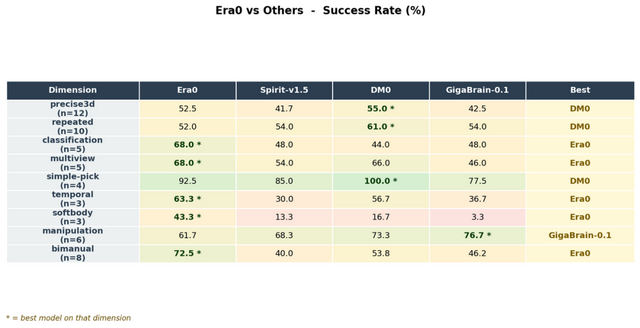
Era0 ranked first across several core dexterous manipulation dimensions, including dual-arm coordination, flexible object handling, multi-view perception, classification tasks, and long-horizon tasks.
According to reports, Era0 demonstrated clear all-around advantages in this evaluation. In dual-arm coordination, it achieved a 72.5 percent success rate in dual-arm tasks and an 80 percent success rate in bimanual tasks, significantly outperforming all competing models. For flexible object manipulation, Era0 reached a 43.3 percent success rate on deformable-object tasks — a category with particularly high difficulty — far ahead of the second-place models DM0 (16.7 percent) and Spirit-v1.5 (13.3 percent). In multi-view perception and long-horizon memory tasks, Era0 achieved success rates of 68 percent and 63.3 percent respectively, leading both categories, which place high demands on perception and memory capabilities.
For specific tasks, Era0 successfully completed several benchmark tasks that other models struggled to handle: In the "table-wiping" task, Era0 achieved a 60 percent success rate, making it the only model among the top eight to successfully complete the task.
In the "make a vegetarian sandwich" task, it achieved a 20 percent success rate, again the only model among the Top 8 capable of completing the task, demonstrating breakthroughs in handling real-world food items and precise object placement.
In the "clear the dining table" task, Era0 ranked first with a 100 percent success rate. In both the "place the bottle opener into the drawer" and "turn on the faucet" tasks, Era0 achieved perfect scores in both task completion and process evaluation, highlighting exceptional execution stability.
A representative from Robotera attributed these results to continuous iteration across data, models, and engineering systems.
Data-Level Improvements
The team established quantitative standards for data quality inspection and processing. Through the removal of static frames, abnormal data screening, metadata alignment, and manual spot checks, they ensured training data quality at the source. The company also accumulated large-scale cross-embodiment pretraining datasets for robotic actions to enhance task transferability.
Model-Level Improvements
A visual localization and perception enhancement strategy was integrated into pre-training, equipping training samples with both high-level semantic information and target spatial coordinates to greatly boost visual perception. For tasks with sequential dependencies such as table-wiping and plant-watering, a short-term temporal memory mechanism was adopted to effectively prevent repetitive actions in non-Markovian scenarios.
Engineering and Inference-Level Optimization
The model was trained on data sampled at 15 Hz. Replay-based validation and fitting verification using training data was added to identify abnormal samples at an early stage. During inference, motion interpolation, execution step-size adjustment and gripper post-processing were applied to further improve trajectory continuity and operational stability.
Robotera's technological strengths extend beyond benchmark rankings. In February this year, Ctrl-World, a controllable generative world model co-developed by Robotera and Professor Chelsea Finn's team at Stanford University, ranked first globally in embodied task performance on WorldArena, leading four key metrics including subject consistency and trajectory accuracy. In March, at Benjie's Humanoid Olympic Games — known as the "Olympics of Embodied Dexterous Manipulation" — Robotera outperformed strong rivals including PI and won three global championships for peeling tangerines, unlocking locks and turning socks inside out. It was the only Chinese enterprise featured on the event's leaderboard.


These technological capabilities have already been translated into real-world productivity. Currently, Robotera has become the first company in the logistics sorting sector to achieve the industry's first product-market fit (PMF) for embodied intelligence in logistics sorting. Its robots are now capable of performing real operational tasks such as sorting and barcode scanning for pharmaceuticals, daily consumer goods, and parcels. The company has established deep partnerships with leading logistics enterprises including China Post and SF Express. Embodied logistics robots have already entered regular operation in more than ten logistics centers across five provinces and municipalities nationwide, achieving a true closed-loop from competition success to industrial value creation.